

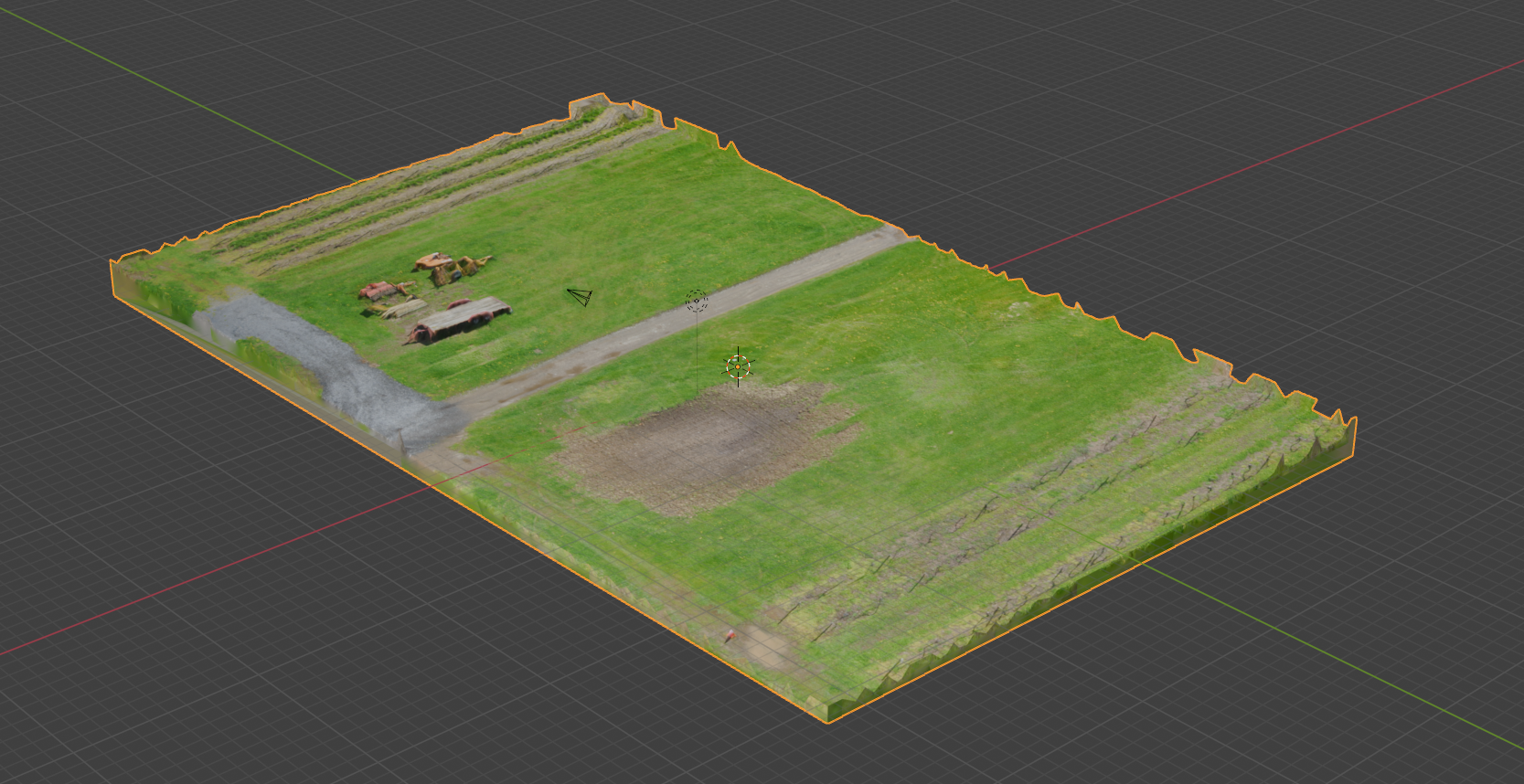
Grape Vineyard Scan This project involved the large-scale 3D scanning of approximately 40 acres of grape vineyards (not shown) in association with the Penn State Grapevine Extension. The goal of the work was to create accurate terrain and surface data to help identify low-lying areas prone to water pooling and flooding. The survey combined drone-based photogrammetry for

Lake Erie Lighthouse Scan
Orange, Remington Matthew2026-05-20T16:43:57-04:00Lake Erie Lighthouse Scan The VAR Lab digitally captured the Lake Erie Land Lighthouse using a mixed-method 3D scanning workflow that combined drone-based imaging with FARO Focus S terrestrial laser scanning. Drone imaging helped document the lighthouse from elevated angles and capture the structure within its surrounding environment, while the FARO Focus S scans provided

Invasive Species Drone Imaging
Orange, Remington Matthew2026-05-20T16:39:53-04:00Drone Imaging for Invasive Species As part of a senior project, the VAR Lab explored how drone imaging could be used to support the identification and documentation of invasive species across outdoor environments. The project focused on using aerial imagery to view plant growth patterns, landscape changes, and areas of concern from perspectives that are

Autonomous Camera Leveling for Robotic Capture
Orange, Remington Matthew2026-05-20T16:38:24-04:00Autonomous Camera Leveling for Robotic Capture The VAR Lab custom fabricated a camera stabilizer system designed to mount on top of multiple robotic platforms and support advanced 3D capture equipment, including the Insta360 Pro 2 and FARO Focus S. Both systems require careful leveling before capture. To speed up that process, our team developed an

Custom Fabricated Mounts for the Unitree Go2
Orange, Remington Matthew2026-05-20T16:36:57-04:00Custom Fabricated Mounts for the Unitree Go2 The VAR Lab designed and fabricated custom back mounts for our Unitree Go2 robot dog to expand how it can be used for demonstrations, research, and mobile technology showcases. To create the mounts, we first 3D scanned the back of the robot to capture its exact shape. The

Turning the Unitree Go2 into a Traveling Technology Showcase
Orange, Remington Matthew2026-05-20T16:35:19-04:00Turning the Unitree Go2 into a Traveling Technology Showcase The VAR Lab created a custom display mount for the Unitree Go2 robot dog that transforms it into a mobile showcase system. This setup uses two portable monitors mounted to the robot’s back and powered through a Raspberry Pi 4. The system pulls battery power directly

Autonomous Campus Guide
Orange, Remington Matthew2026-05-20T16:33:12-04:00Autonomous Campus Guide The VAR Lab is developing a custom AI system for the Unitree Go2 robot dog to support interactive education and campus storytelling. This project involves installing a local large language model directly onto the robot, allowing it to answer student questions about Penn State Behrend history, campus life, and general topics. The

Landing Place: AI-Driven Wellness App
Orange, Remington Matthew2026-05-20T16:32:34-04:00Landing Place: AI-Driven Wellness App The VAR Lab is developing Landing Place, an AI-driven wellness app designed to support mental health and connect users with helpful resources. This project brings together technology, psychology, and student collaboration to create a real-world therapeutic support tool. VAR Lab members are working on the app’s frontend design, backend systems,
LabVIS: Assisted Development
Orange, Remington Matthew2026-05-20T16:31:44-04:00LabVIS: Assisted Development The VAR Lab is developing LabVIS in collaboration with Federal University of Health Sciences of Porto Alegre (UFCSPA) under the management of Fulbright Scholar Bibiana Mayer Steckel. LabVIS is an immersive virtual reality experience being designed with future therapeutic applications for children with Autism Spectrum Disorder. The project is currently in the testing
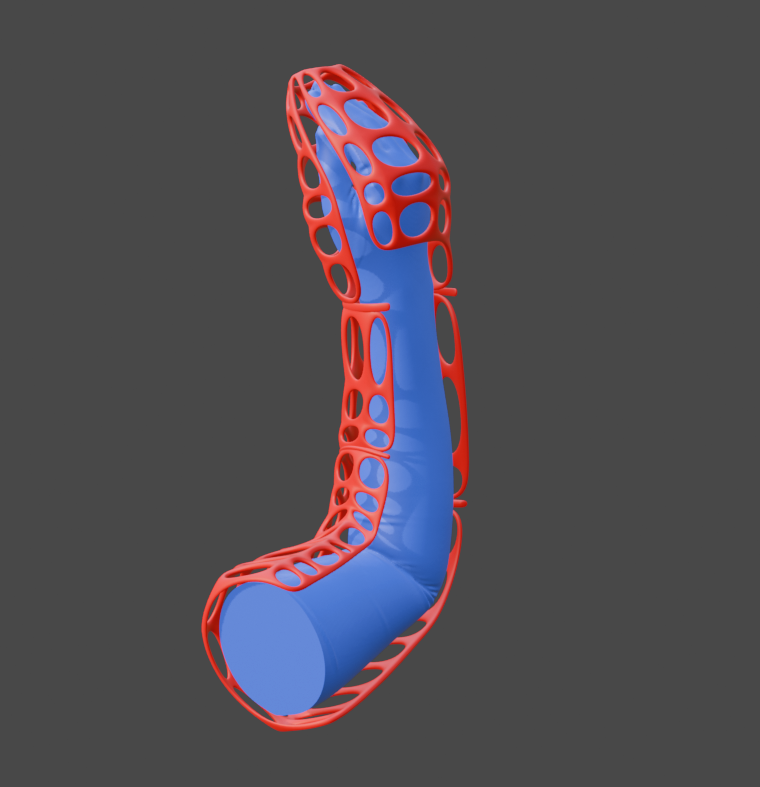
3D-Printed CIMT Constraint Orthosis
Orange, Remington Matthew2026-05-20T16:29:16-04:003D-Printed CIMT Constraint Orthosis The VAR Lab is developing a custom 3D-printed constraint orthosis in collaboration with Fulbright Scholar Bibiana Mayer Steckel to support research related to Constraint-Induced Movement Therapy (CIMT). This project explores how 3D scanning, digital modeling, and 3D printing can be used to create a more customized and child-friendly alternative to traditional